В июне 1995 года на Парижском Авиасалоне израильская фирма Rafael опубликовала
информацию об управляемой ракете класса "воздух-воздух" четвертого
поколения Python-4. Разработка ракеты была начата в начале 80-ых гг. Создатели
ракеты ориентировались на вероятное противостояние самолетам противника
с российскими УР Р-73. Python-4 разрабатывалась
для применения на большом
количестве самолетов, и оптимизирована для высокоманевренного воздушного
боя с выходом на большие углы атаки и использования нашлемной системы
целеуказания. На вооружение еврейских ВВС УР была принята в 1992 году.
В отличие от российской УР Р-73, ракета Python-4 не оснащена
системой управления вектором тяги. Для управления полетом
используются
четыре дельтовидные руля и два прямоугольных. В хвостовой части ракеты
расположены четыре фиксированных крыла с длинными корневыми наплывами,
которые обеспечивают дополнительную жесткость корпусу ракеты при маневрировании
с большими перегрузками. Четыре крыла расположенные за рулями свободно
подвешены (аналогично французской УР Magic R550), за ними
расположен лазерный
взрыватель.

Некоторые американские источники указывают информацию
о том, что УР оснащена охлаждаемой биспектральной ИК ГСН, но евреи говорят
о тепловизионной ГСН оснащенной матрицей ИК датчиков, с возможностью отсеивания
ложных целей и паразитного теплового фона Земли (хотя возможно, что тепловизионная
ГСН будет установлена на последующих вариантах ракеты). Типичная биспектральная
ГСН (например, FIM-92C Stinger) состоит из
охлаждаемого аргоном четырехмикронного
чувствительного элемента (обычно исполняется
из сурьмянистого индия), и
датчика ультрафиолетового излучения (выполняется из кремния или арсенида
галлия). Самолет (цель) имеет низкую ультрафиолетовую и высокую ИК сигнатуру,
и биспектральная ГСН позволяет Стингеру легко отсеивать ложные цели, такие
как тепловые ловушки. ГСН Python-4 способна обнаруживать цели на существенно
большей дальности, чем AIM-9M. Это обеспечивается повышенной чувствительностью
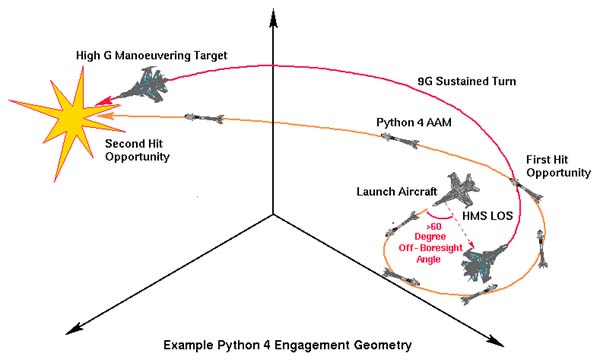
многоэлементной матрицей. ГСН позволяет обстреливать цели находящиеся
под углом до 60° к продольной оси и маневрировать при этом с перегрузкой
до 70g. При этом ракета способна осуществить разворот на 180° по отношению
к носителю. Во время маневрирования угол сопровождения цели достигает
±90°. По некоторым данным ГСН способна отсеивать три спектральных
диапазона.
Python-4 так же оснащена цифровым сигнальным процессором
и цифровой системой управления полетом. Использование цифровой техники
позволяет добиться большей дальности обнаружения по сравнению с аналоговой
за счет более полного использования многоэлементной ГСН. На ЦСП
ложатся
задачи селекции ложных целей. Цифровая система управления полетом позволяет
ракете оптимизировать законы управления и осуществлять выбор наиболее
подходящего алгоритма наведения.
Диаметр корпуса как и многие агрегаты аналогичны УР Python-3.
Ракета оснащена двухрежимным двигателем ND-10, с четырехсекундным
разгонным
и восьмидесятисекундным маршевым режимами. Стреловидные крылья позволяют
снизить вращающий момент на больших углах атаки при разворотах с высокими
перегрузками.
Во время боя пилот, даже если цель находится под большим
углом по отношению к носителю, используя нашлемную систему целеуказания
должен всего лишь повернуть голову на цель и произвести запуск ракеты.